Exoskeletons and Exosuits
Restoring mobility by synergizing with the human.
The focus on this research effort is to restore mobility for those with locomotion deficiency resulting from spinal cord injury and stroke. Two methods are being simultaneously explored to achieve this goal: powered lower body exoskeletons to restore mobility for paraplegics, and soft exoskeletons to correct for gait in a joint-by-joint fashion. In both cases, the goal is to restore mobility with the next generation of exoskeletons and exosuits that will eliminate the need for wheelchairs, crutches and other mobility aids.

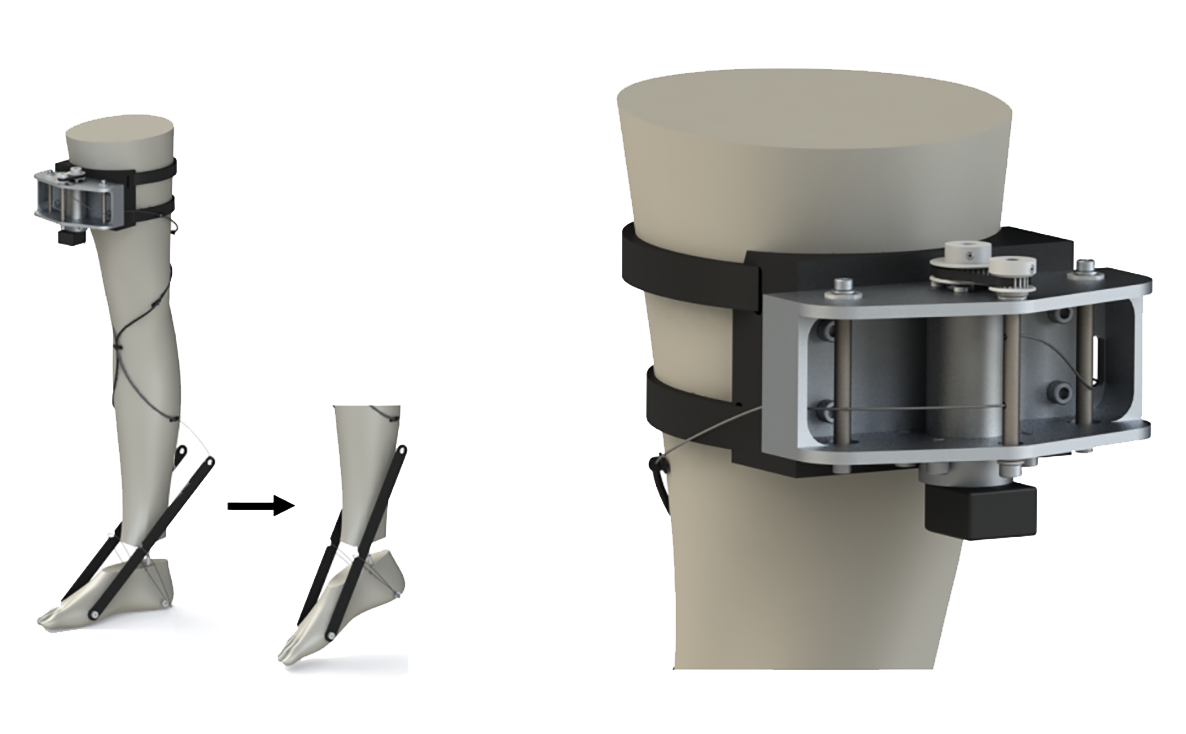
Soft exosuits are being developed to allow for powered assistance at a single joint; this is aimed at users that have locomotion deficiencies that augementation at a single joint can address. In this setting, the interactions between the human and exosuit are being studied to allow for optimal assistance as needed by the user with the goal being natural and efficient locomotion.

For hard exosuits, methods are translated from robotic walking to allow full lower-body exoskeletons to walk dynamically with a human user to enable for locomotion even when the user has no function in their lower limbs.
First dynamic exoskeleton walking with paraplegics. Achieved through a mathematical control framework for dynamic locomotion realized on the ATALANTE exoskeleton developed by Wandercraft.
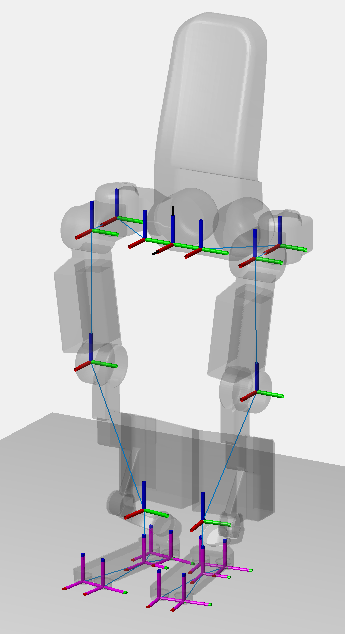
Simulated stable gait
Experimental testing of maintaining a flat swing foot
Experimental testing of active ankle stabilization
Experimental testing of balance perturbations